
2.007 Robot: Magnetic Gripper Design
- rebecca-mc

- Apr 21, 2019
- 1 min read
Updated: Mar 28, 2020
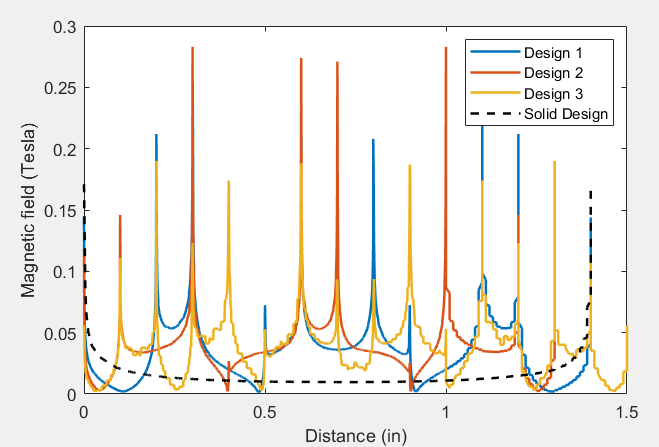
I designed a controllable permanent magnet gripper using the concepts of magnetic fringing and variable reluctance paths.
In 2.007, Design and Manufacturing, students compete to create robots that can accomplish certain tasks. The task my robot performs is to pick up, transport, and put down small steel flags. It consists of two major design elements:










Comments